useless machine

Dies ist meine Version der useless machine.
Nun ja - der einzige Sinn dieser Konstruktion ist es tatsächlich, einmal eingeschaltet, sich selber wieder auszuschalten. Ein wirklich nettes Gimmik - schon fast philosophisch- und ein weiterer Haken auf meiner ewigen ToDo Liste.
Wenn Sie das zum ersten Mal hören - einfach mal nach "useless machine" in der Suchmaschine Ihrer Wahl suchen oder hier nachsehen.
Zur Funktion:
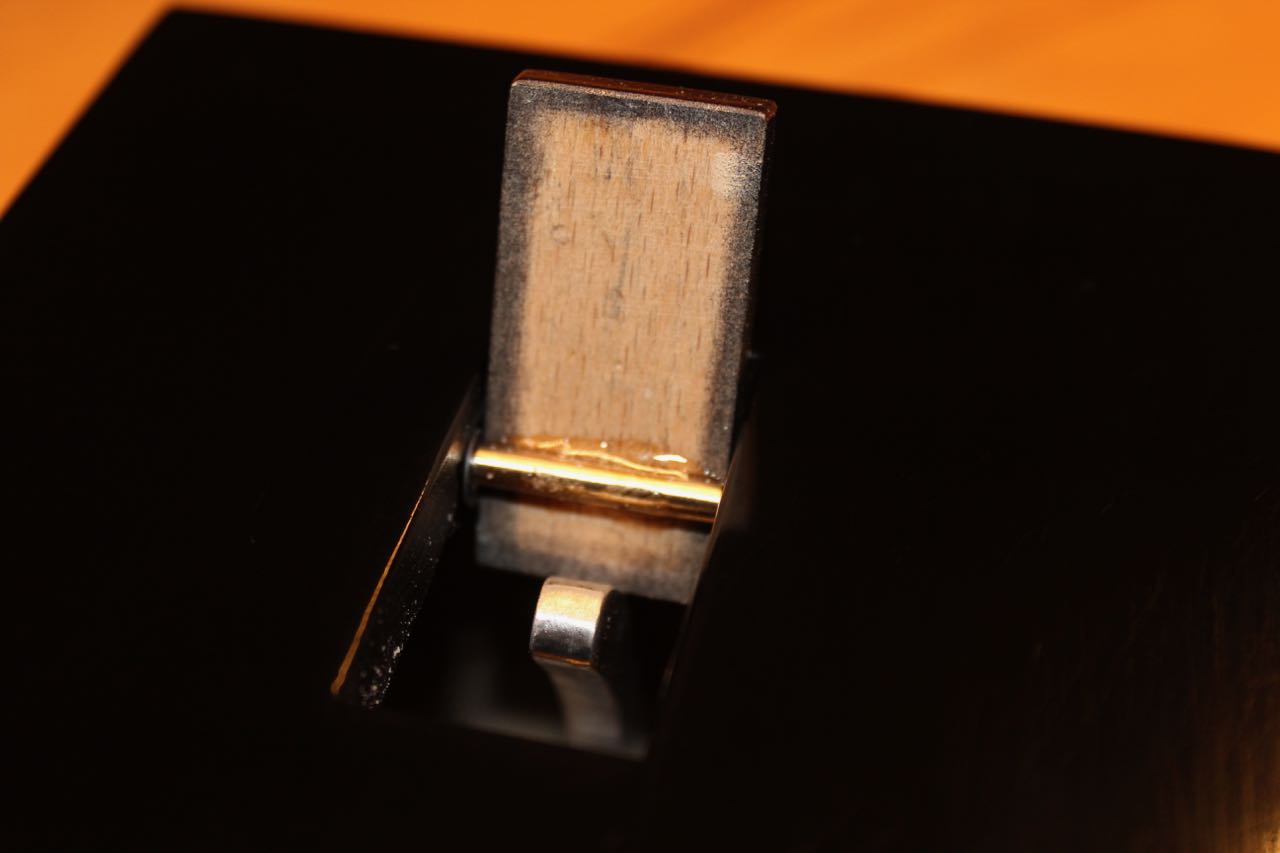
Nach dem Einschalten des Kippschalters fährt ein zuvor im Inneren der Box verborgener (Alu-)Arm aus einer Klappe im Deckel der Box und schaltet den Kippschalter wieder aus. Der Hebel fährt anschließend zurück in die Box und verbleibt untätig bis zum nächsten Einschalten.
Hinweise zu dieser Konstruktion:
In meiner Version übernimmt die Steuerung ein kleiner Mikrocontroller aus der Microchip PIC Serie, ein PIC12F675. Software siehe unten.
Die Geschwindigkeit des Arms - auch Pausen zwischen den einzelnen Phasen der Bewegung sind möglich- lässt sich über die Software steuern und ist bei jedem Einschalten etwas anders. 16 verschiedene Programmabfolgen sind mit der Software möglich. Details können dem kommentierten Quelltext entnommen werden.
Der Mikrocontroller befindet sich in der "Aus"-Position im Sleep Modus und verbraucht daher sehr wenig Strom - einen "echten" Ein/Aus Schalter gibt es daher nicht.
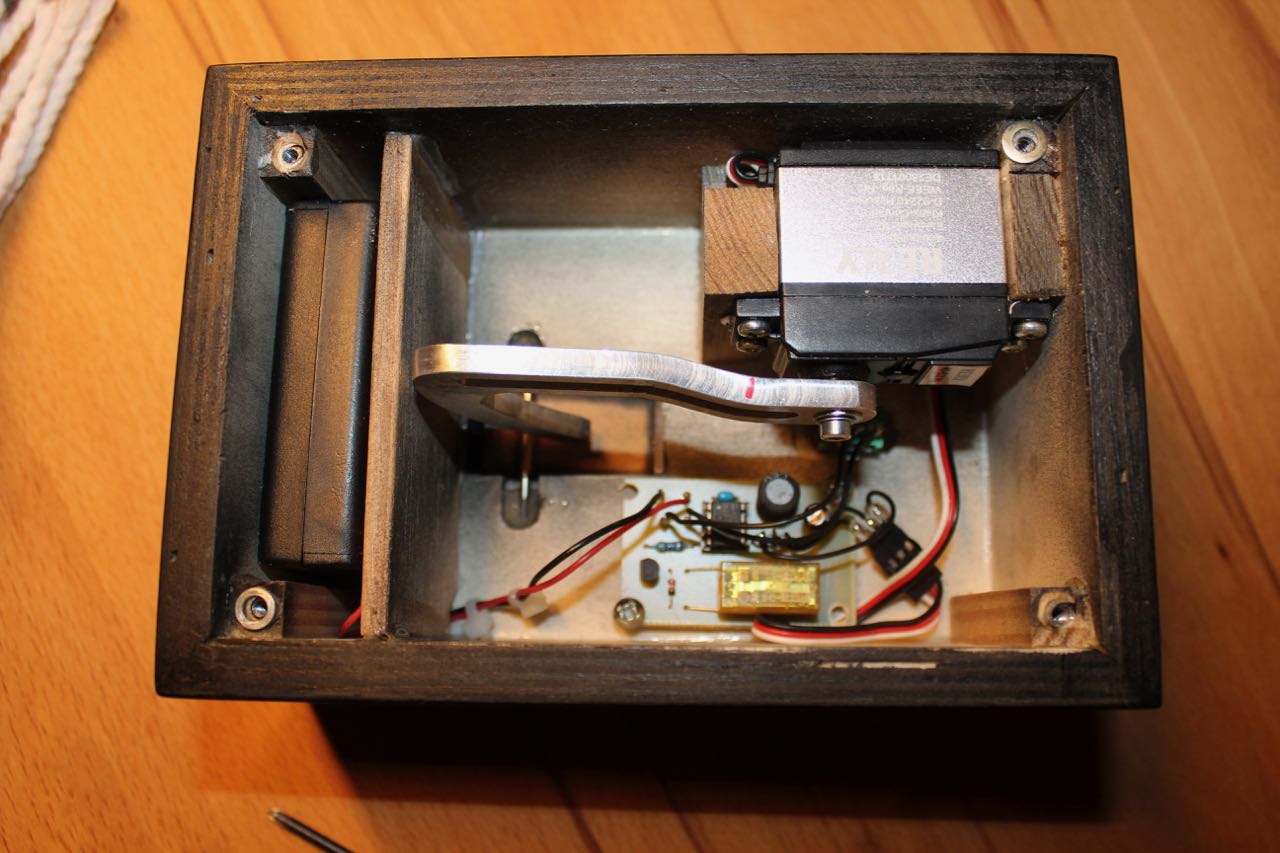
Die eigentliche Bewegung des Arms übernimmt ein Modellbau-Servo. Im vorgestellten Prototyp kommt ein Servo in Standard Größe zum Einsatz, dieser sollte aber ein ausreichend hohes Drehmoment ermöglichen, um den Schalter sicher ausschalten zu können. Der von mir eingesetzte Servo schafft lt. Datenblatt 70Ncm bei 4,8V, in diesem Fall bei einer Versorgungsspannung von nur 4,5V also etwas weniger. Ein Test mit einem 20Ncm Servo war jedenfalls nicht erfolgreich, bitte also bei dem Einkauf darauf achten.
Da Modellbau Servos je nach Typ etwas unterschiedlich auslenken sollte (besser gesagt muss) der Quelltext nach Fertigstellung an die Gegebenheiten angepasst werden. Die relevanten Parameter sind "minp", mit der die Position des Arms in Ruhestellung eingestellt werden kann und der Parameter "maxp", der den Endanschlag darstellt - dieser sollte so bemessen werden, dass der Schalter sicher ausgeschaltet wird.
Weiteres (auch zur Anpassung der "Programme") siehe Quelltext.
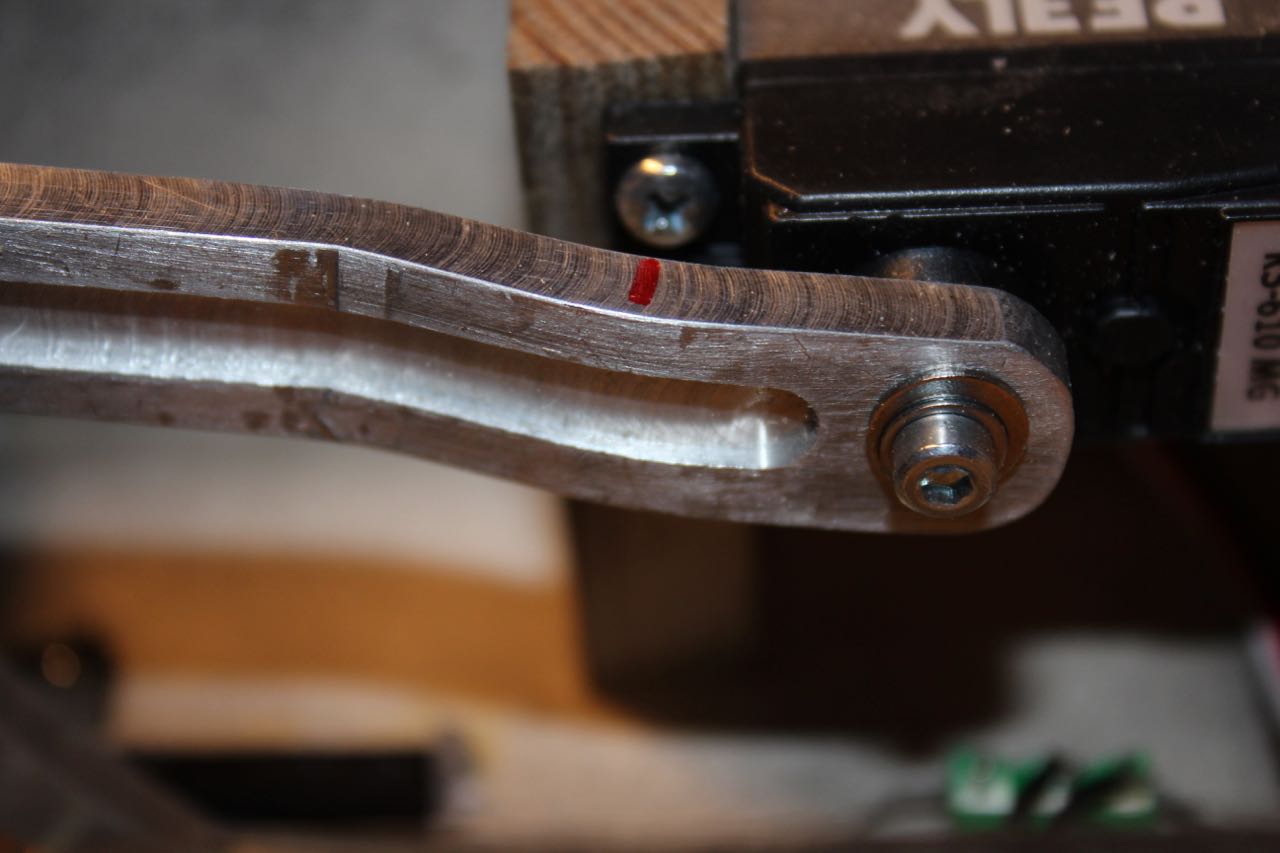
Die eigentliche Box besteht aus einer verleimten Sperrholz-Konstruktion mit eingeschraubtem Boden. Als Finisch habe ich einen schwarzen Hochglanz-Lack gewählt, hier kann natürlich aber der eigene Geschmack entscheiden. Innerhalb der Box sind Abstandshalter für den Servo entsprechend dem eingesetzten Servo einzuleimen, da die unterschiedlichen Hersteller der Servos doch etwas in der Höhe differieren macht eine Vorgabe hier wenig Sinn. Da ich selber während der Konstruktion den Servo wechseln musste ist der Alu-Betätigungsarm bei meiner Version nachträglich mit einem Absatz versehen worden, um die Position des Schalters zu erreichen. (siehe Bilder) Bei vorausschauender Planung und entsprechender Dimensionierung der Servo-Halterung ist das also nicht unbedingt nötig.
Innerhalb des Gehäuses ist ein Fach für die Aufnahme eines Batteriekastens (3* 1,5V Mignon) mit einem Sperrholzbrettchen abgetrennt worden.
Zur Montage des Servos und der Bodenplatte sind in die Holzkonstruktion Alu-Hülsen mit M3 Gewinde eingeklebt - daher können für die Befestigung normale M3 Schrauben verwendet werden.
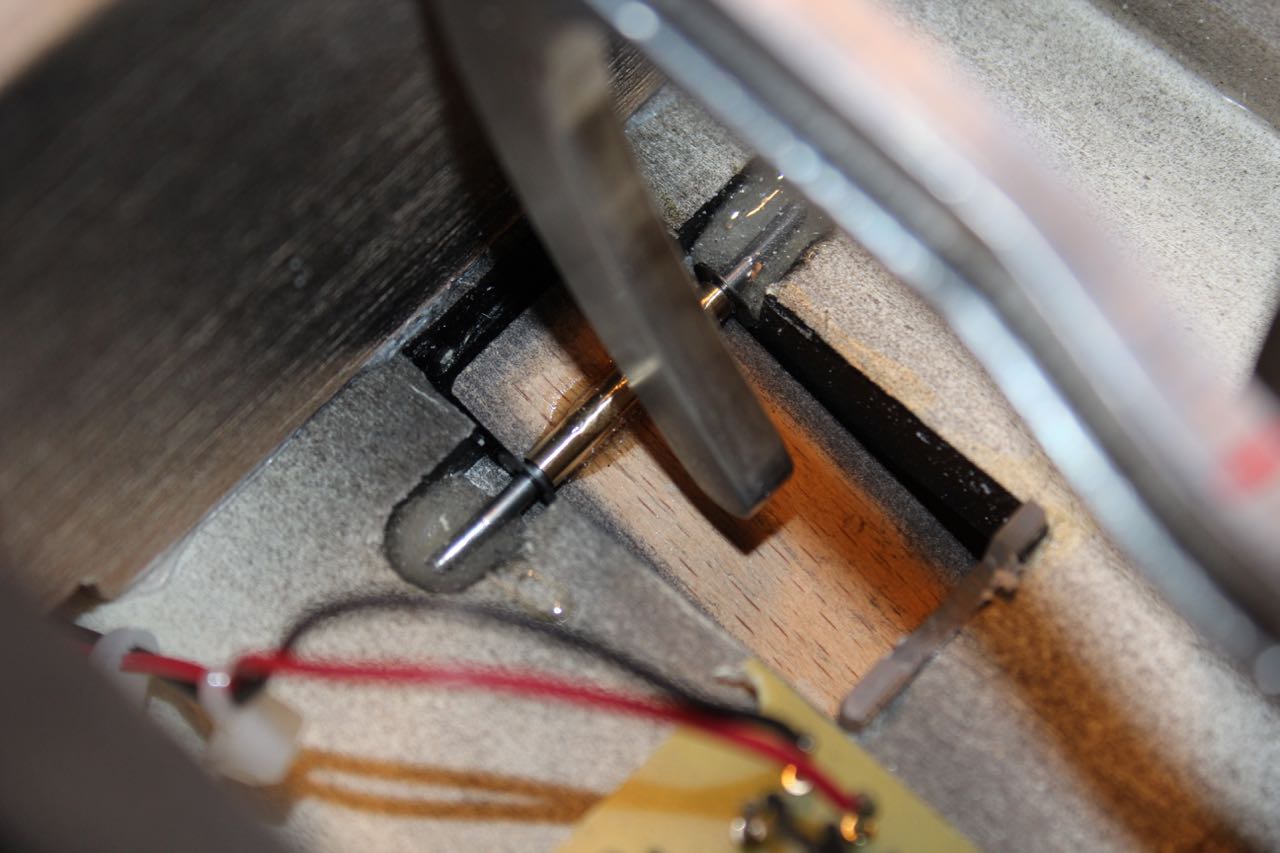
Die Klappe, aus der der Arm herauskommt, ist als Lager mit einem aufgeklebten Messingröhrchen (Innendurchmesser 2mm) und einem Stück Silberstahl mit ebenfalls Durchmesser 2mm als Achse versehen. Die Achse ist ebenfalls simpel am Gehäuse mit 2-Komponenten-Kleber befestigt.
Für die Befestigung des Servo-Arms verwenden die Hersteller unterschiedliche Zahnteilungen auf der Abtriebsachse. Der von mir eingesetzte Servo hat 25 Zähne (wohl auch Futaba Standard), die in dem Alu Arm des Prototypen mit einem Teilapparat gestoßen wurden. Ein ziemlich aufwendiges Verfahren. Ggf. kann beim Nachbau der Arm auch einfach geklemmt oder festgeklebt werden. Eine weitere Idee wäre, ein passendes Servohorn entsprechend zu bearbeiten und in den Alu-Arm einzukleben.
Ach ja: Wichtig ist noch, dass es sich bei dem in den Bildern gezeigten Aufbau um einen linksdrehenden Servo handeln muss - also bei steigender Impulslänge der Servo nach links (entgegen dem Uhrzeigersinn) drehen muss. Bei Verwendung eines anderen Servos muss der Servo auf der gegenüberliegenden Seitenwand der Box befestigt werden - oder notfalls die Software angepasst werden.
Hier ein paar unkommentierte Bilder - Klick auf die Miniatur öffnet größere Ansicht.





Downloads
SchaltplanPlatinenlayouts und Bestückungsplan
Gehäuseentwurf
Quelltext und übersetztes HEX
Für die Funktion der Schaltung kann ich trotz sorgfältiger Prüfung keine Gewährleistung übernehmen. Nachbau und Nutzung also auf eigenes Risiko!